Matrix Calculator
Solve Matrix Algebra: Multiplication, Inverse, and Determinants
Calculation Examples
Mastering Matrix Operations
Matrices are the foundation of linear algebra, applied across computer graphics, machine learning, engineering systems, and economic modeling. Our Matrix Calculator supports multiplication, addition, subtraction, and transposition for matrices of any compatible dimensions.
The tool validates dimensional compatibility before computing: for multiplication, the number of columns in Matrix A must equal the number of rows in Matrix B. If dimensions are incompatible, the tool identifies the conflict and explains the required format, preventing the most common source of manual errors.
How Are Matrix Calculations Performed?
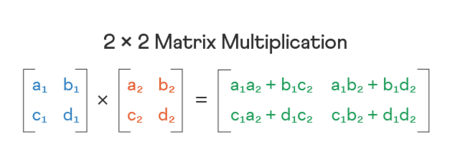
Addition and subtraction are performed element-wise: \((A \pm B)_{ij} = A_{ij} \pm B_{ij}\), and require matrices of identical dimensions. Matrix multiplication follows the dot-product rule: \(C_{ij} = \sum_{k} A_{ik} \cdot B_{kj}\). Determinants for \(2 \times 2\) matrices use the formula \(\det(A) = ad - bc\), while for larger matrices the tool applies Laplace cofactor expansion or LU decomposition for computational efficiency.
Inverses are computed via Gaussian elimination to find \(A^{-1}\) such that \(A \cdot A^{-1} = I\), and exist only when \(\det(A) \neq 0\).
Useful Tips 💡
- Before attempting to find an inverse, check the determinant first. A zero determinant means the matrix is singular and has no inverse.
- Matrix multiplication is not commutative: A times B does not equal B times A in general. Always verify the order before computing.
📋Steps to Calculate
-
Set the dimensions of your matrices (rows x columns).
-
Fill in the numeric elements for each matrix.
-
Select the operation (multiplication, determinant, inverse, transpose) and click "Calculate".
Mistakes to Avoid ⚠️
- Multiplying matrices in the wrong order. Unlike scalar multiplication, AB and BA produce different results and are not interchangeable.
- Attempting to multiply matrices with incompatible dimensions. The number of columns in the first matrix must equal the number of rows in the second.
- Entering values in transposed order by mistake, which produces a structurally correct but numerically wrong result with no error message.
- Attempting to compute a determinant for a non-square matrix. Determinants are defined only for square matrices (n by n).
Practical Applications📊
Solve systems of linear equations in algebra and engineering using matrix inversion or row reduction.
Analyze geometric transformations in computer graphics, including rotation, scaling, and projection.
Optimize multi-variable engineering and economic models where relationships between variables are expressed as matrix equations.