Calculadora de Fuerza Neta
Calcula la magnitud y dirección de la fuerza resultante sumando todos los vectores de fuerza que actúan sobre un objeto.
Fuerza resultante
Ejemplos de cálculo
¿Cómo usar la calculadora de fuerza neta?
Identifica todos los vectores de fuerza que actúan sobre el objeto, habitualmente a partir de un diagrama de cuerpo libre (DCL). Introduce la magnitud de cada fuerza en Newtons y su ángulo en grados, medido en sentido antihorario desde el eje X positivo (0° para la derecha, 90° para arriba, 180° para la izquierda, 270° para abajo). La herramienta permite añadir múltiples fuerzas concurrentes.
Al pulsar "Calcular", la calculadora descompone cada vector en sus componentes horizontales (\(F_x\)) y verticales (\(F_y\)), suma todas las componentes por separado y obtiene la magnitud y dirección de la fuerza neta resultante. El resultado incluye los componentes totales, la magnitud final y el ángulo de la resultante, con toda la información necesaria para determinar si el objeto está en equilibrio o experimenta aceleración.
La física de la fuerza neta: ecuaciones y método de cálculo
La fuerza neta es el vector único que representa la suma de todas las fuerzas externas que actúan sobre un cuerpo. Según la Segunda Ley de Newton (\(\vec{F}_{net} = m \cdot \vec{a}\)), es la responsable directa de la aceleración del sistema. El cálculo sigue el método de descomposición en componentes cartesianas: \[F_x = F \cdot \cos(\theta), \quad F_y = F \cdot \sin(\theta)\] \[\sum F_x = F_{1x} + F_{2x} + \cdots, \quad \sum F_y = F_{1y} + F_{2y} + \cdots\] \[F_{net} = \sqrt{(\sum F_x)^2 + (\sum F_y)^2}\] \[\theta_{net} = \arctan\!\left(\frac{\sum F_y}{\sum F_x}\right)\] La función arcotangente se evalúa considerando el cuadrante correcto (función atan2) para obtener el ángulo real entre 0° y 360°. Este método es válido para cualquier combinación de fuerzas colineales, perpendiculares o en ángulos arbitrarios en el plano 2D.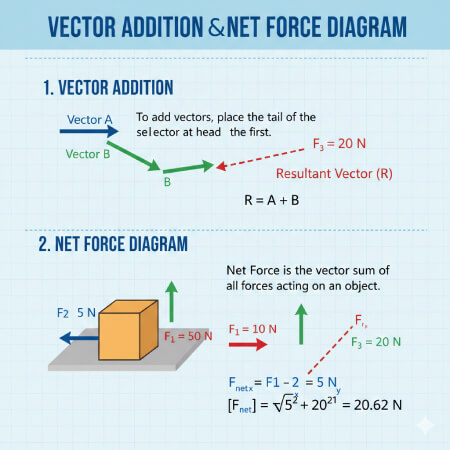
Guía de Uso y Consejos 💡
- Para fuerzas que apuntan a la izquierda usa 180°, para abajo 270°: la convención antihoraria desde el eje X positivo es estándar en física y debe aplicarse de forma consistente.
- La fuerza neta es una cantidad vectorial: la magnitud por sí sola no describe el movimiento sin conocer también la dirección.
- Verifica que todas las fuerzas estén en las mismas unidades (N, kN o lbf) antes de introducirlas: mezclar unidades es la fuente de error más frecuente en este tipo de problemas.
📋Pasos para Calcular
-
Lista todas las fuerzas que actúan sobre el objeto usando un diagrama de cuerpo libre.
-
Introduce la magnitud en Newtons y el ángulo en grados de cada vector de fuerza.
-
Pulsa Calcular para ver la magnitud resultante, el ángulo y los componentes totales.
Errores a evitar ⚠️
- Tratar las fuerzas como escalares sumando solo sus magnitudes sin considerar la dirección, lo que produce una resultante incorrecta.
- No aplicar la función atan2 para determinar el cuadrante correcto del ángulo resultante, lo que puede invertir la dirección de la fuerza neta.
- Omitir fuerzas no evidentes como la fricción, la fuerza normal o la tensión de cables al construir el diagrama de cuerpo libre.
- Mezclar grados y radianes en comprobaciones trigonométricas manuales, produciendo errores en las componentes calculadas.
Aplicaciones prácticas📊
Calcular la aceleración resultante de un objeto usando la Segunda Ley de Newton una vez obtenida la fuerza neta.
Ingeniería estructural: verificar que la fuerza neta en nudos de puentes o uniones de edificios sea cero (equilibrio estático).
Aerodinámica: sumar sustentación, peso, empuje y arrastre para determinar el rendimiento neto de una aeronave.
Robótica: determinar los requisitos de par motor a partir del análisis de fuerza neta sobre las articulaciones.